3 模型识别
本章主要学习,对于给定的时间序列,如何选取适当的\(p,d,q\),从而建立\(ARIMA(p,d,q)\)模型。
3.1 主要方法
利用样本自相关函数估计\(MA(q)\)模型的自相关函数,再利用模型自相关函数的截尾性估计\(q\)
利用样本偏自相关函数估计\(AR(p)\)模型的偏自相关函数,再利用模型偏自相关函数的截尾性估计\(p\)
利用拓展的自相关系数估计\(ARMA(p,q)\)模型的\(p,q\)
3.2 实践操作
3.2.1 例1
理论模型\(MA(1)\): \[ Y_t = e_t-0.9e_{t-1} \]
时间序列数据:
下面我们开始模型识别。
先绘制样本自相关函数图:
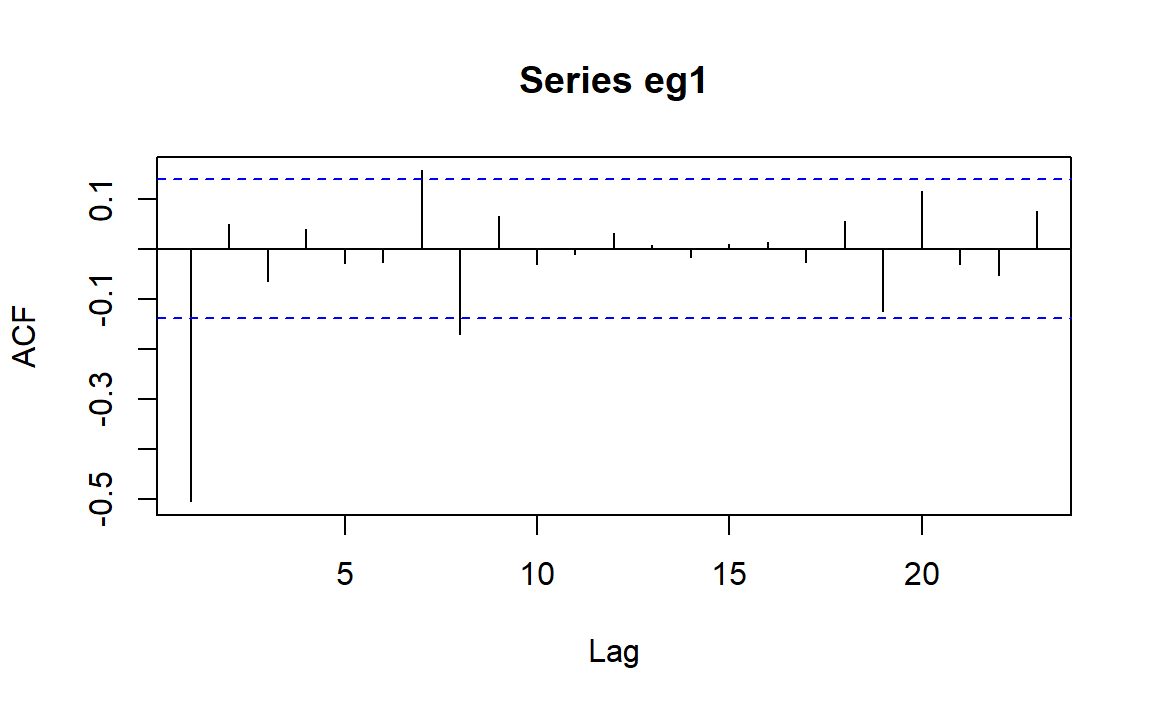
利用函数
acf绘制样本自相关图。上下两条虚线表示,自相关系数是否显著为0的临界值。此时的临界值是基于白噪声过程中的近似大样本标准误差,即\(1/\sqrt{n}\)。
可以看到滞后1阶ACF值显著不为0,滞后7,8阶稍微超过临界值。可以考虑一下\(MA(q)\)模型。
修正一些ACF临界值:
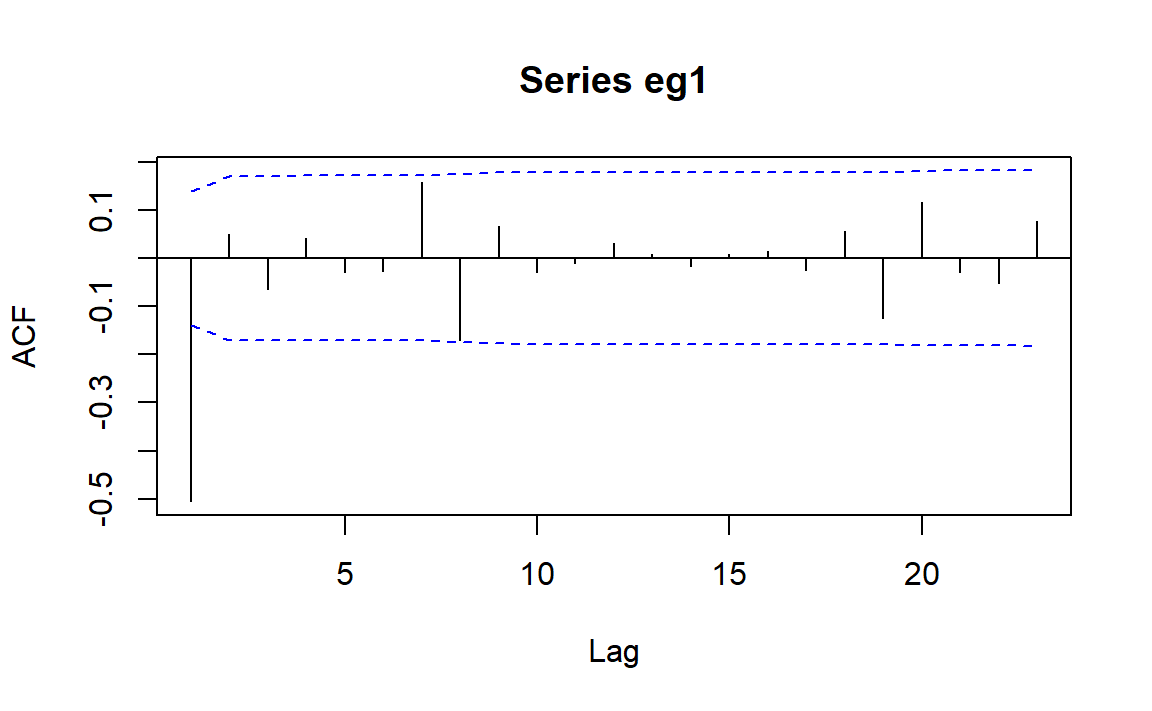
可以看到,此时只有滞后1阶ACF显著不为0,意味着我们可以考虑为这个序列拟合\(MA(1)\)模型。
3.2.2 例2
理论模型\(MA(2)\): \[ Y_t = e_t-e_{t-1}+0.6e_{t-2} \]
时间序列数据:
下面我们开始模型识别。
先绘制样本自相关函数图:
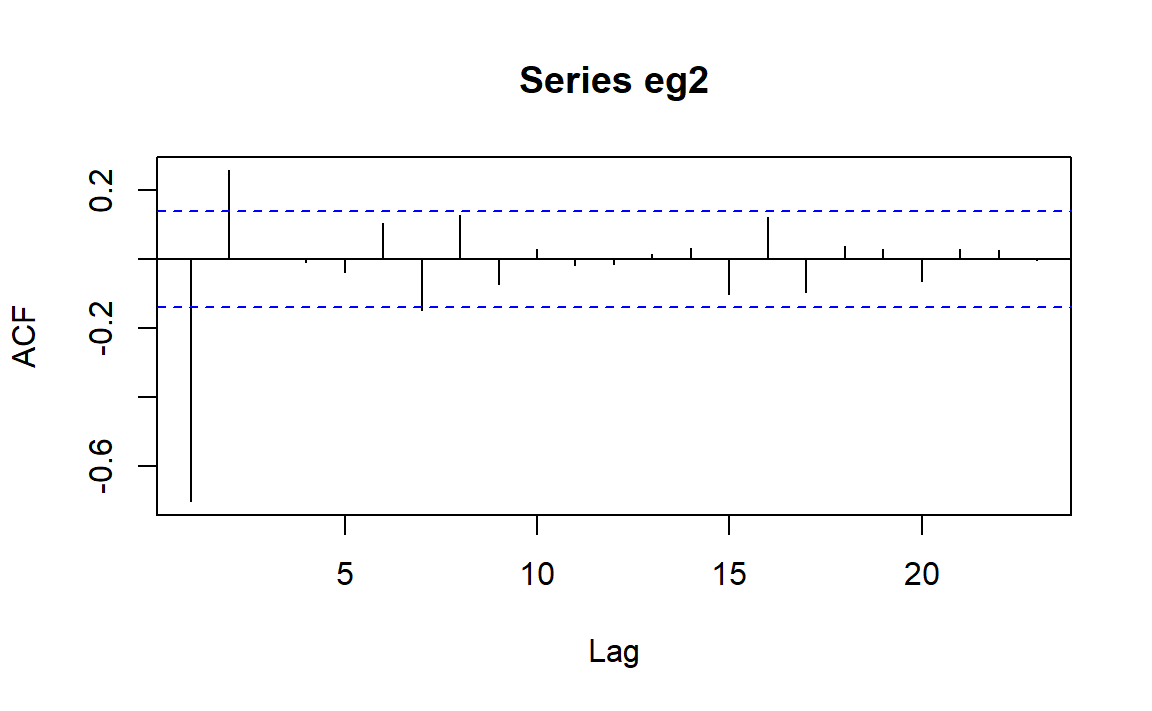
可以看到比较明显的滞后截尾性,滞后1,2阶ACF值显著不为0,滞后7阶稍微超过临界值。可以考虑一下\(MA(q)\)模型。
修正一下ACF临界值:
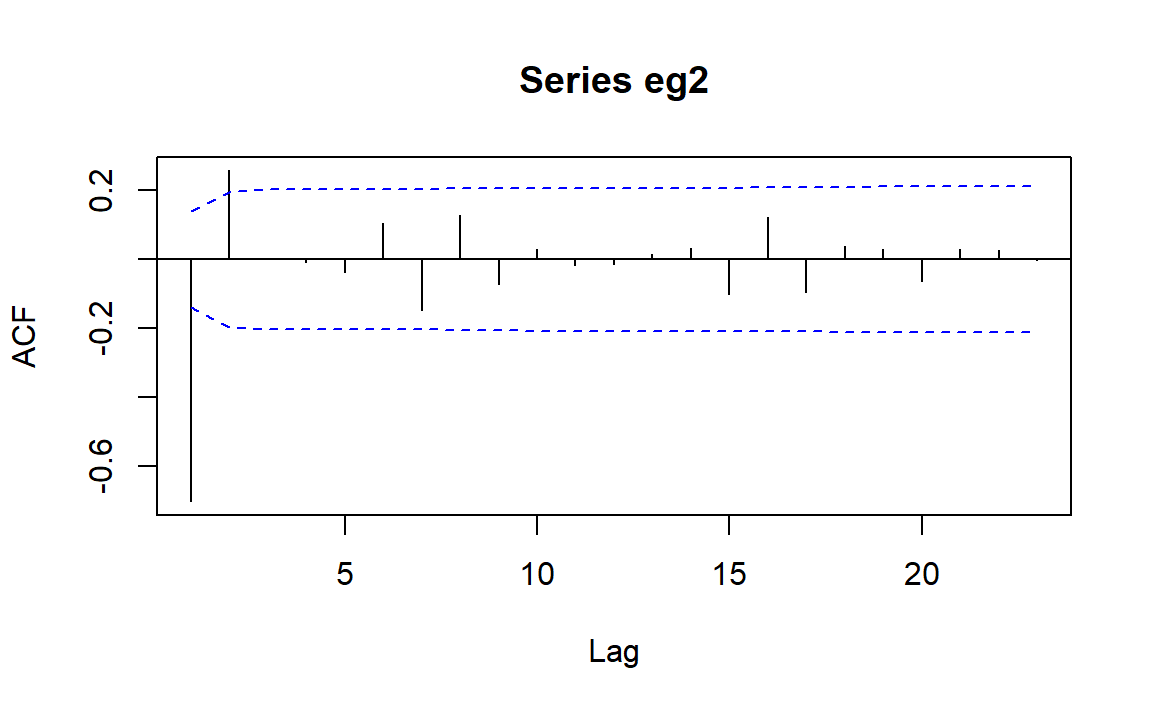
可以看到,此时只有滞后1,2阶ACF显著不为0,意味着我们可以考虑为这个序列拟合\(MA(2)\)模型。
3.2.3 例3
理论模型\(AR(1)\): \[ Y_t = 0.9Y_{t-1}+e_t \]
时间序列数据:
下面我们开始模型识别。
先绘制样本自相关函数图:
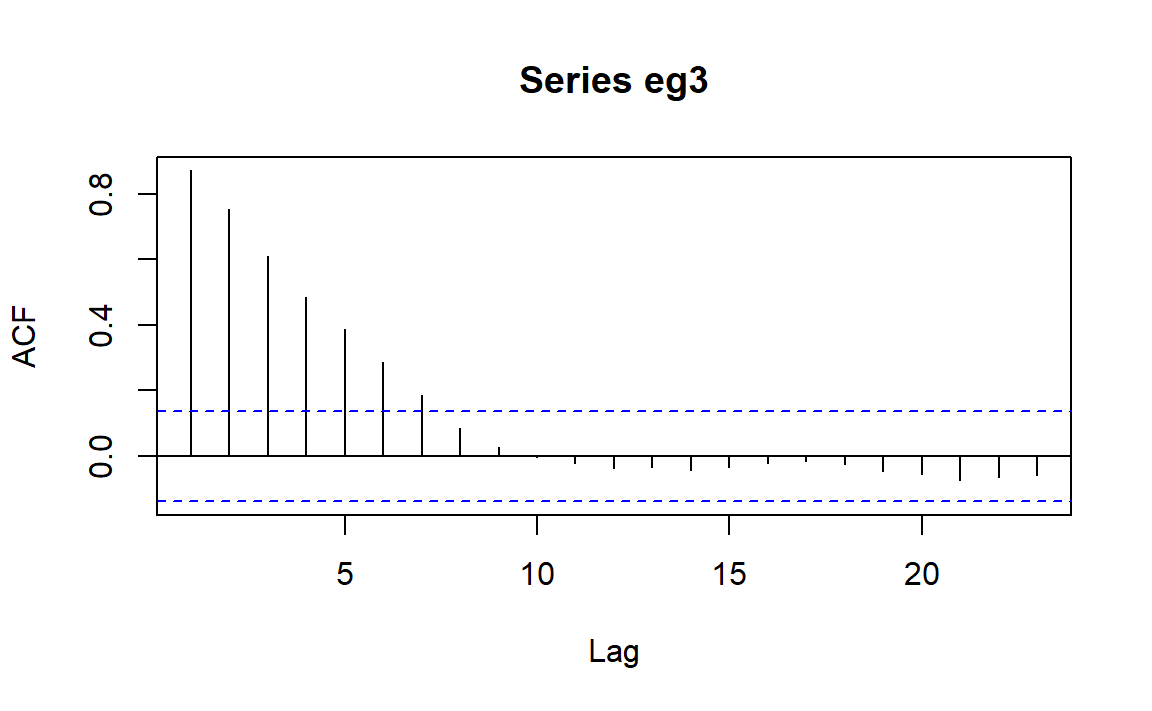
与理论图像1.5不太一致,样本ACF更像是线性递减而不是指数递减,并且不是一直保持大于0。但这并不影响我们去考虑\(AR(p)\)模型。
观测样本偏自相关系数PACF图像:
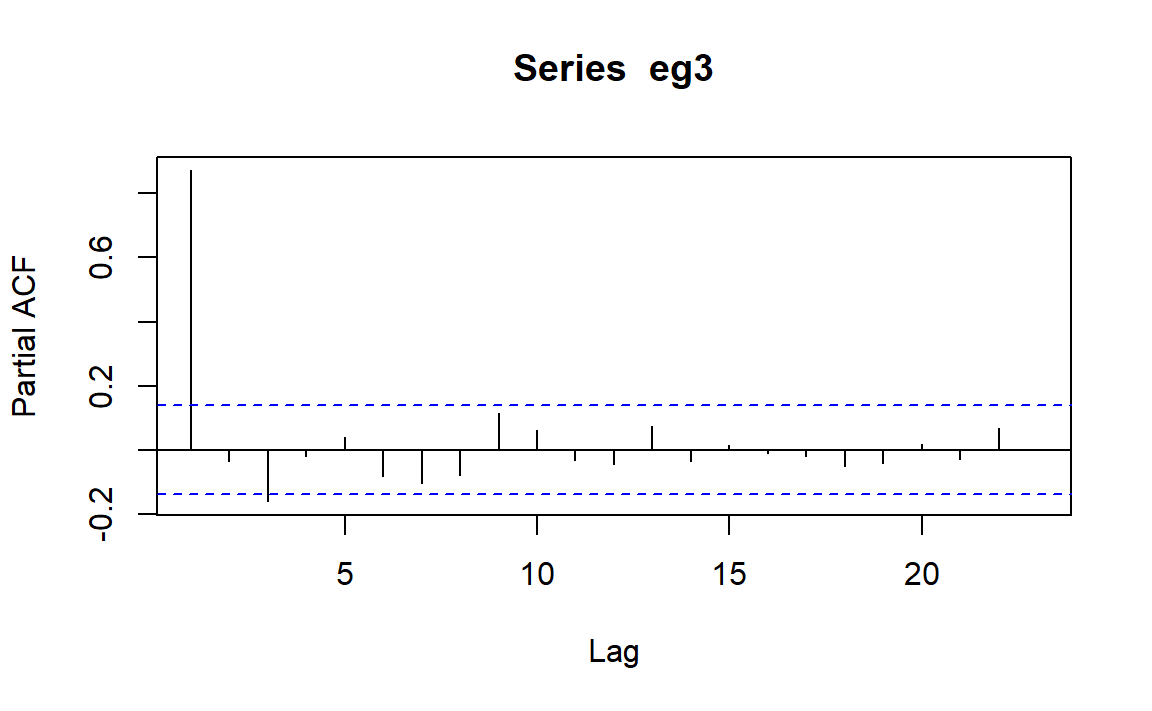
可以看到,此时滞后1阶PACF显著不为0,滞后3阶稍微超过临界值,意味着我们可以考虑为这个序列拟合\(AR(1)\)模型,但在模型诊断时需要进一步研究滞后3阶的显著性。
3.2.4 例4
理论模型\(AR(2)\): \[ Y_t = 1.5Y_{t-1}-0.75Y_{t-2}+e_t \]
时间序列数据:
下面我们开始模型识别。
先绘制样本自相关函数图:

图像呈阻尼正弦波动曲线,可以考虑一下\(AR(p)\)模型。
观测样本偏自相关系数PACF图像:
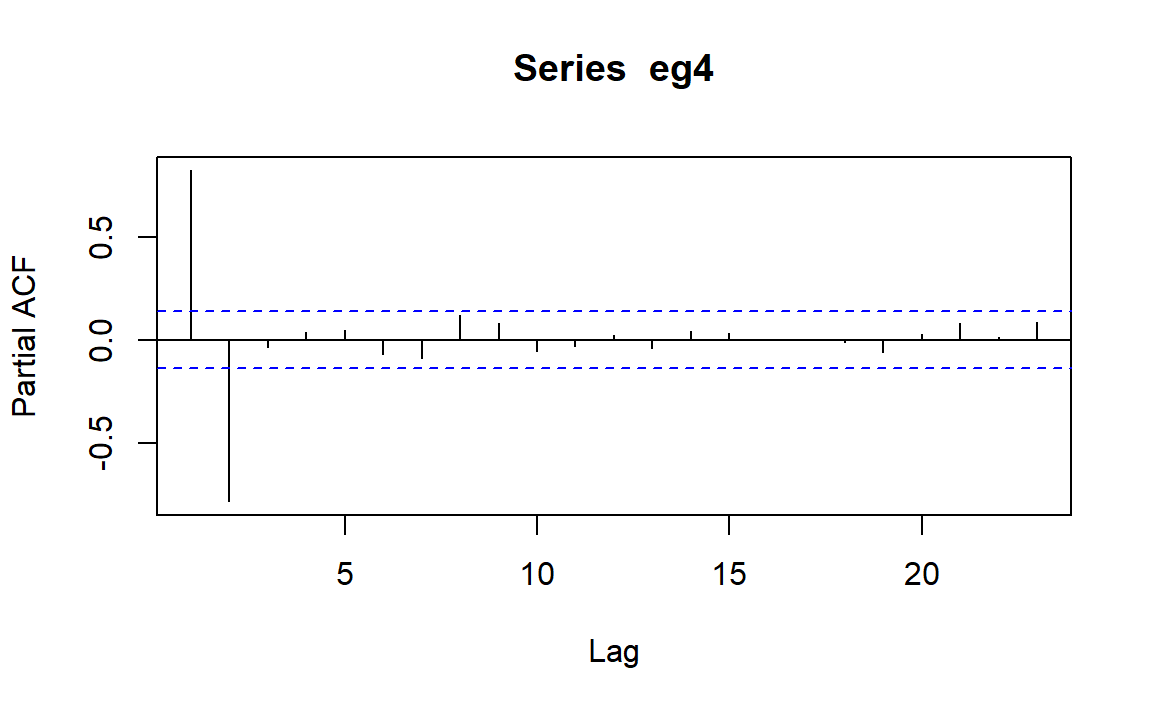
可以看到,此时只有滞后1,2阶PACF显著不为0,意味着我们可以考虑为这个序列拟合\(AR(2)\)模型。
3.2.5 例5
理论模型\(ARMA(1,1)\): \[ Y_t = 0.6Y_{t-1}+e_t+0.3e_{t-1} \]
时间序列数据:
下面我们开始模型识别。
先绘制样本自相关函数图:
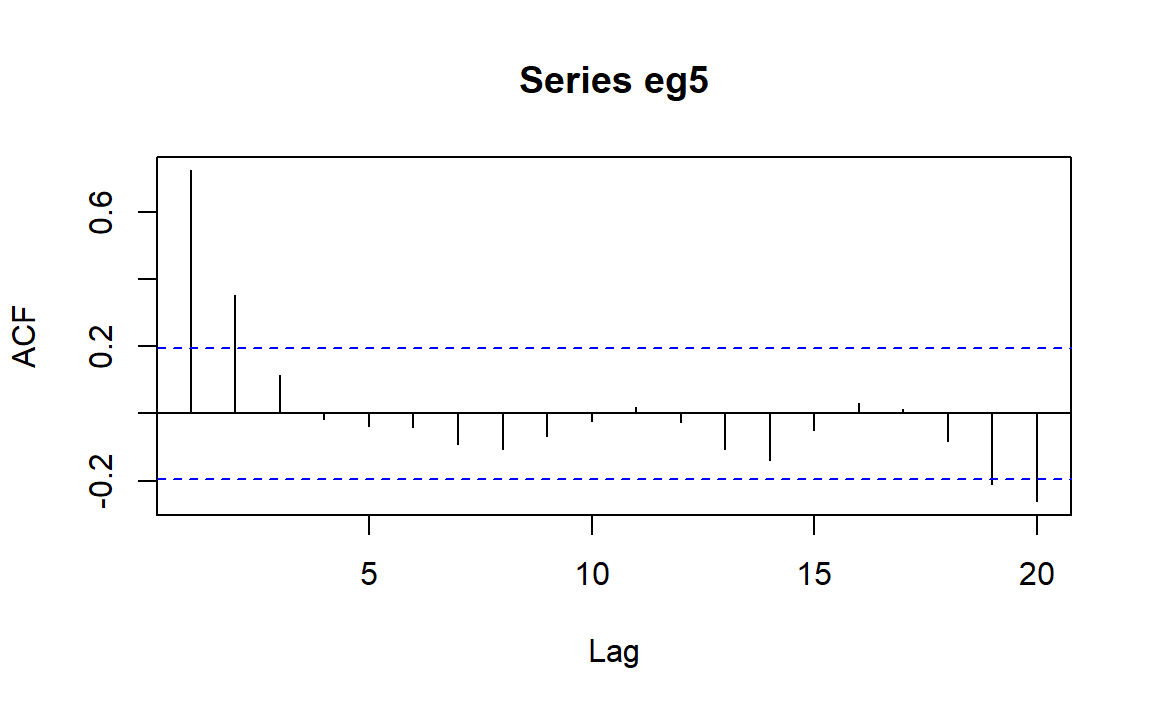
样本PACF:

综上,看起来我们应该为序列拟合\(AR(1)\)模型。
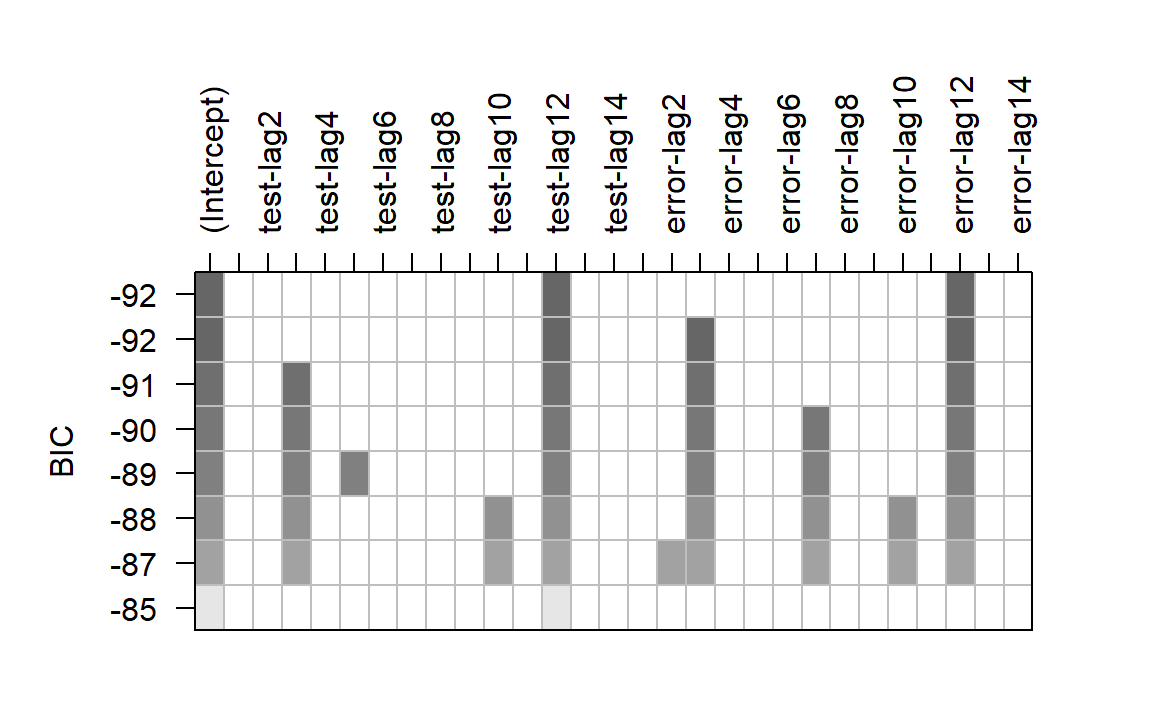
但是,我们看一下拓展的自相关系数EACF:
eacf(eg5)
#> AR/MA
#> 0 1 2 3 4 5 6 7 8 9 10 11 12 13
#> 0 x x o o o o o o o o o o o o
#> 1 x o o o o o o o o o o o o o
#> 2 x x o o o o o o o o o o o o
#> 3 x o o o o o o o o o o o o o
#> 4 x x o x o o o o o o o o o o
#> 5 x o x x o o o o o o o o o o
#> 6 x x x o o o o o o o o o o o
#> 7 x x o o o o o o o o o o o o这表示我们应该为该序列拟合\(ARMA(1,1)\)模型。
接下来我们看一下前4个例子的EACF:
eacf(eg1)
#> AR/MA
#> 0 1 2 3 4 5 6 7 8 9 10 11 12 13
#> 0 x o o o o o x x o o o o o o
#> 1 x x o o o o o x o o o o o o
#> 2 x x o o o o o x o o o o o o
#> 3 x x o o o o o x o o o o o o
#> 4 x x x o x o o x o o o o o o
#> 5 x o o o x o o x o o o o o o
#> 6 x x x x x x o x o o o o o o
#> 7 x x o o o x o o o o o o o o
eacf(eg2)
#> AR/MA
#> 0 1 2 3 4 5 6 7 8 9 10 11 12 13
#> 0 x x o o o o x o o o o o o o
#> 1 x x x o o o o o o o o o o o
#> 2 x x o o o o o o o o o o o o
#> 3 x x x x x o o o o o o o o o
#> 4 x o x x x o o o o o o o o o
#> 5 x x x x x o o o o o o o o o
#> 6 o x x o o o o o o o o o o o
#> 7 x o o o o o o o o o o o o o
eacf(eg3)
#> AR/MA
#> 0 1 2 3 4 5 6 7 8 9 10 11 12 13
#> 0 x x x x x x x o o o o o o o
#> 1 o x o o o o o o o o o o o o
#> 2 x x o o o o o o o o o o o o
#> 3 o x o o o o o o o o o o o o
#> 4 x o x o o o o o o o o o o o
#> 5 x o x o o o o o o o o o o o
#> 6 x x x x o o o o o o o o o o
#> 7 x o x x o x o o o o o o o o
eacf(eg4)
#> AR/MA
#> 0 1 2 3 4 5 6 7 8 9 10 11 12 13
#> 0 x x o x x x x o o x x x o o
#> 1 x x o x x x x o x x x x o o
#> 2 o o o o o x o o o o o o o o
#> 3 x o o o o x o o o o o x o o
#> 4 x x o o o o o o o o o x o o
#> 5 x x o o o o o o o o o x o o
#> 6 x x o o o o o o o o o o o o
#> 7 x x o o x o o o o o o o o o均支持我们之前的模型假设。
3.3 非平稳性模型
3.3.1 观察图像
序列的非平稳性经常表现在图像中,如;
3.3.2 ADF单位根检验
DF检验核心思想:对差分序列的检验等价于与原序列的AR特征多项式是否存在单位根。
增强的Dickey-Fuller检验,原假设为该过程非平稳,但差分一次后平稳,备择假设为该过程平稳。可以用于检验是差分平稳性以及趋势平稳性。
首先对过程差分AR定阶,然后利用ADF.test再进行ADF检验。
下面以随机游动为例,进行ADF检验。
首先差分AR定阶:
data("rwalk")
ar(diff(rwalk))
#>
#> Call:
#> ar(x = diff(rwalk))
#>
#> Coefficients:
#> 1 2 3 4 5 6 7 8
#> -0.162 -0.123 0.004 -0.196 -0.160 -0.342 0.065 -0.323
#>
#> Order selected 8 sigma^2 estimated as 0.839ADF检验,原假设为具有单位根,备择假设具有未知均值(截距)的平稳序列:
ADF.test(rwalk,selectlags = list(mode=c(1,2,3,4,5,6,7,8),Pmax=8),
itsd = c(1,0,0))
#> Warning in interpolpval(code = code, stat = adfreg[, 3], N = N): p-value is
#> greater than printed p-value
#> --------- ------ - ------ ----
#> Augmented Dickey & Fuller test
#> --------- ------ - ------ ----
#>
#> Null hypothesis: Unit root.
#> Alternative hypothesis: Stationarity.
#>
#> ----
#> ADF statistic:
#>
#> Estimate Std. Error t value Pr(>|t|)
#> adf.reg -0.036 0.059 -0.601 0.1
#>
#> Lag orders: 1 2 3 4 5 6 7 8
#> Number of available observations: 51开上帝视角,代入真实AR阶数0阶,继续ADF检验:
ADF.test(rwalk,selectlags = list(Pmax=0),
itsd = c(1,0,0))
#> Warning in interpolpval(code = code, stat = adfreg[, 3], N = N): p-value is
#> greater than printed p-value
#> --------- ------ - ------ ----
#> Augmented Dickey & Fuller test
#> --------- ------ - ------ ----
#>
#> Null hypothesis: Unit root.
#> Alternative hypothesis: Stationarity.
#>
#> ----
#> ADF statistic:
#>
#> Estimate Std. Error t value Pr(>|t|)
#> adf.reg -0.087 0.05 -1.74 0.1
#>
#> Lag orders: 0
#> Number of available observations: 59两次ADF检验的P值都大于0.1,表明有比较强的证据支持原假设,即有单位根(差分一次后平稳)。
由于:
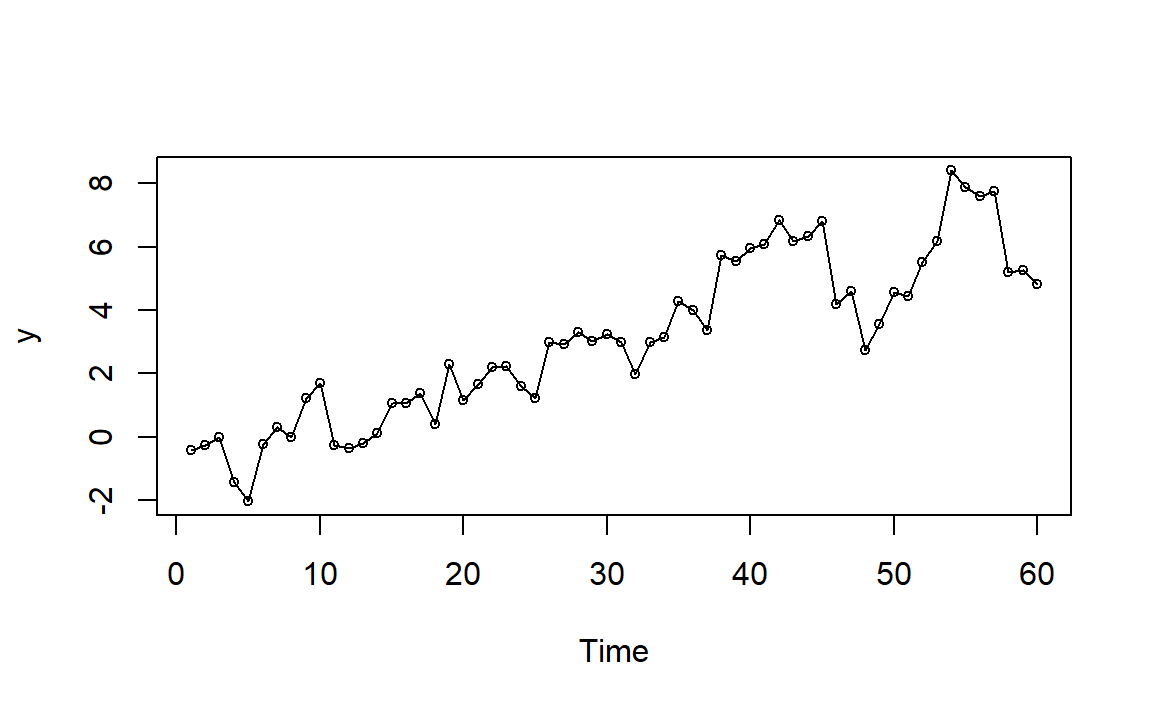
随机游动的图像看起来似乎有线性趋势,我们使用ADF检验一下:
ADF.test(rwalk,selectlags = list(mode=c(1,2,3,4,5,6,7,8),Pmax=8),
itsd = c(1,1,0))
#> Warning in interpolpval(code = code, stat = adfreg[, 3], N = N): p-value is
#> greater than printed p-value
#> --------- ------ - ------ ----
#> Augmented Dickey & Fuller test
#> --------- ------ - ------ ----
#>
#> Null hypothesis: Unit root.
#> Alternative hypothesis: Stationarity.
#>
#> ----
#> ADF statistic:
#>
#> Estimate Std. Error t value Pr(>|t|)
#> adf.reg -0.637 0.278 -2.29 0.1
#>
#> Lag orders: 1 2 3 4 5 6 7 8
#> Number of available observations: 51P值大于0.1,没有足够把握拒绝单位根假设。
ADF.test(rwalk,selectlags = list(Pmax=0),
itsd = c(1,1,0))
#> --------- ------ - ------ ----
#> Augmented Dickey & Fuller test
#> --------- ------ - ------ ----
#>
#> Null hypothesis: Unit root.
#> Alternative hypothesis: Stationarity.
#>
#> ----
#> ADF statistic:
#>
#> Estimate Std. Error t value Pr(>|t|)
#> adf.reg -0.39 0.112 -3.49 0.05
#>
#> Lag orders: 0
#> Number of available observations: 59P值约为0.05,有较弱的证据拒绝原假设,即认为该序列是具有线性趋势的非平稳序列(线性趋势+平稳误差),但实际上只是差分非平稳。这个例子表明,小样本下很难区分差分非平稳以及趋势非平稳。